向いている人
- ロボシリンダーが何をする機器か知りたい人
- エアシリンダーとの違いを整理したい人
- 原点復帰・位置No・完了信号の意味をつかみたい人
IAIロボシリンダーとは、ざっくり言うとモーターで動く電動シリンダーです。
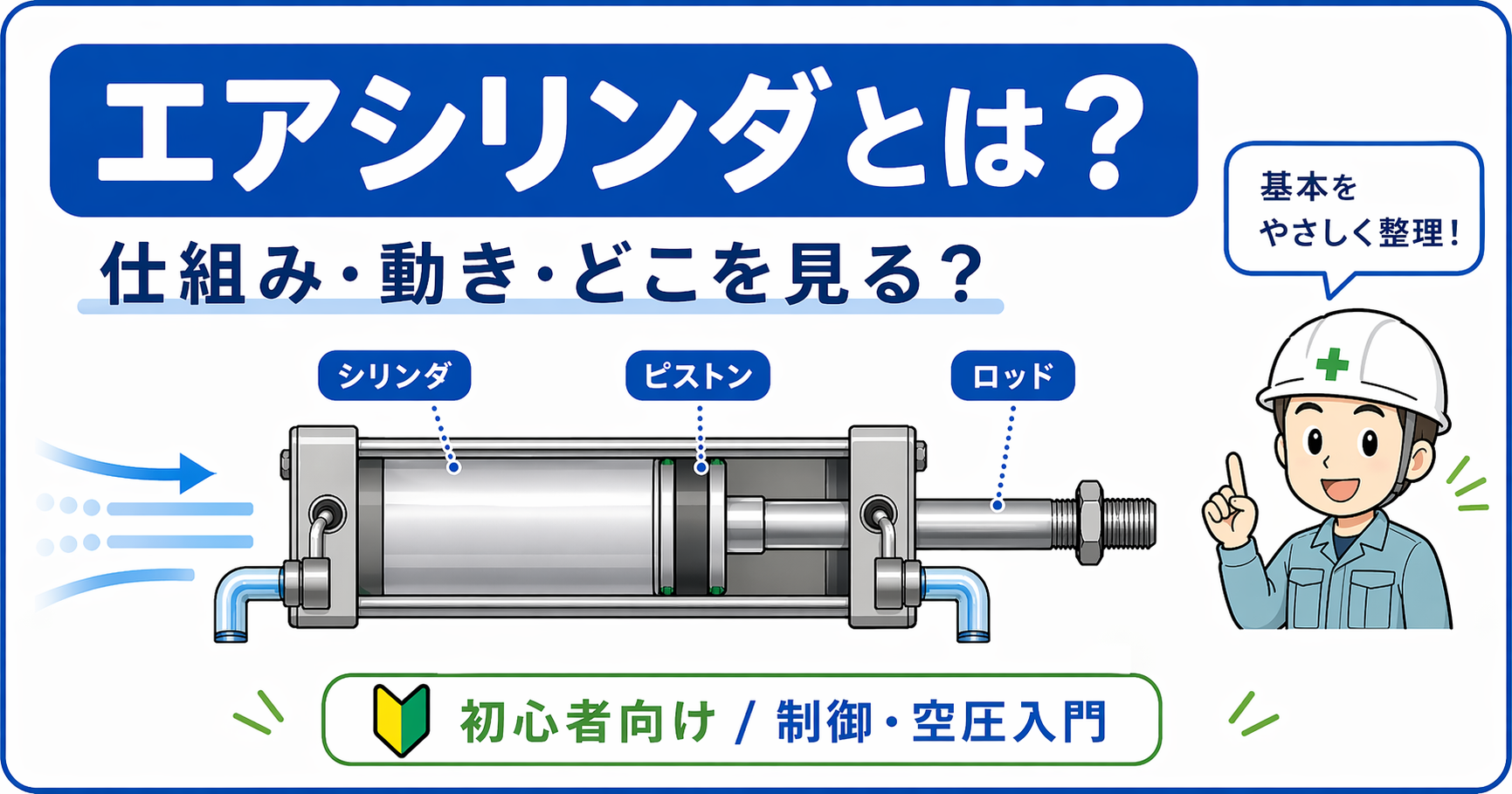
エアシリンダーのように前進・後退させるだけでなく、指定した位置まで動かしたり、速度を変えたり、途中位置で止めたりできるのが大きな特徴です。
現場では、ワークを押す、スライドさせる、位置を合わせる、搬送の一部を動かす、検査位置までゆっくり持っていくなど、空気圧だけでは少し調整しにくい場所で使われます。
最初から細かい型式や設定を覚えるより、エアシリンダーよりも細かく位置や速度を決めやすい駆動機器として見ると理解しやすいです。

後輩ロボシリンダーって、名前だけ見るとロボットみたいで難しそうです。普通のシリンダーとは別物ですか?

先輩最初は難しく考えなくていいよ。まずは「モーターで動く、位置を決めやすいシリンダー」と考えると入りやすいね。
ロボシリンダーは、本体だけで動いているように見えても、実際にはコントローラ、電源、PLC、入出力信号が関係します。
現場で見る時は、まず「どこが動く本体か」「どこにコントローラがあるか」「PLCと何の信号でつながっているか」を分けると追いやすくなります。
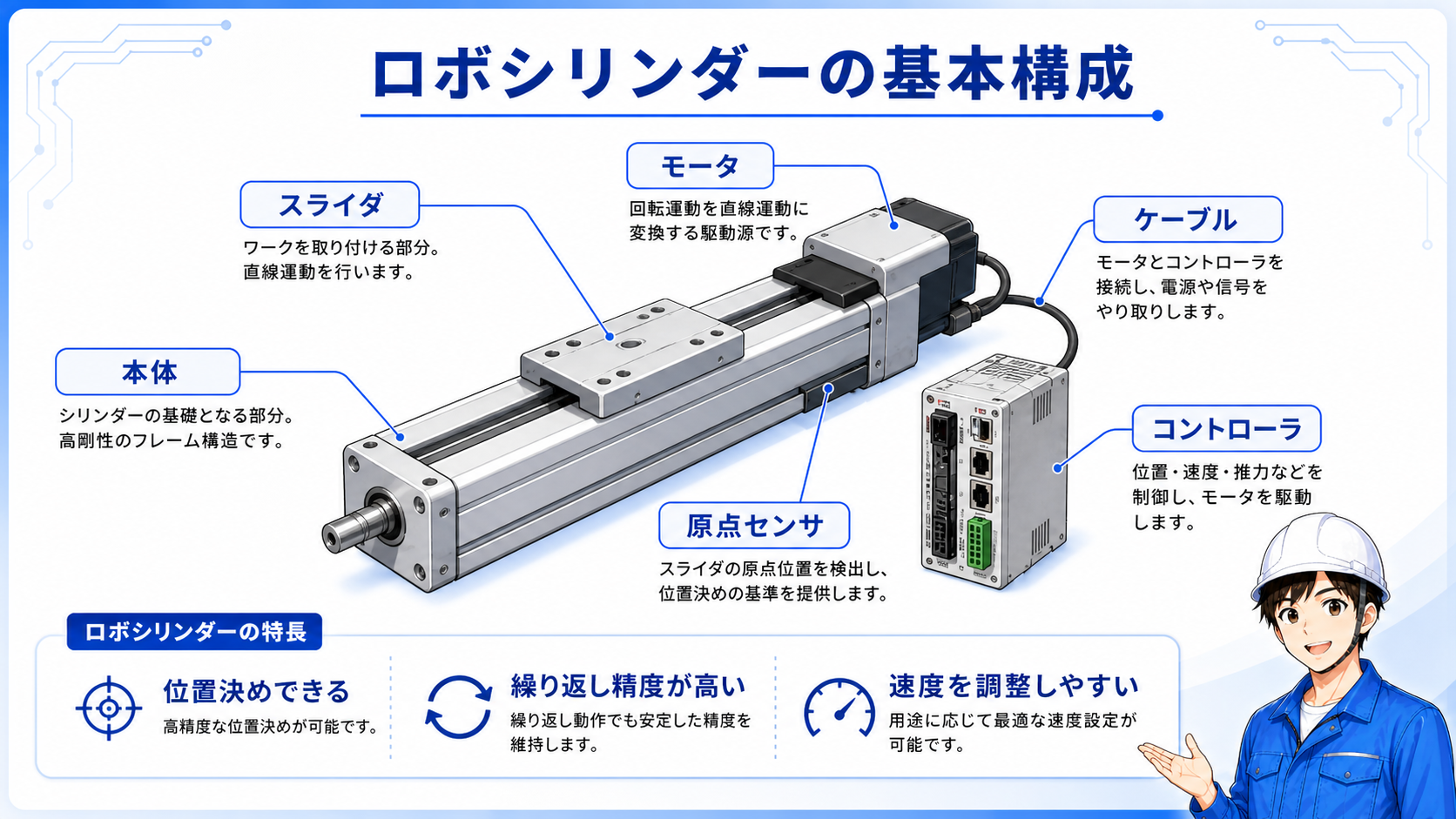
実際に動く部分です。スライダやロッドが動き、ワークを押す、送る、位置決めするなどの役割を持ちます。
ロボシリンダーを動かすための制御部です。位置データ、速度、加減速、押付け条件などの設定が入ります。
位置No選択、起動、停止、原点復帰、リセットなど、設備側から動作指令を出します。
位置決め完了、原点復帰完了、移動中、アラームなど、ロボシリンダー側の状態をPLCへ返します。

ロボシリンダーの不具合確認では、本体、コントローラ、PLC指令、戻り信号をセットで見ることが大切です。
ロボシリンダーを理解する時は、エアシリンダーと比べると分かりやすいです。
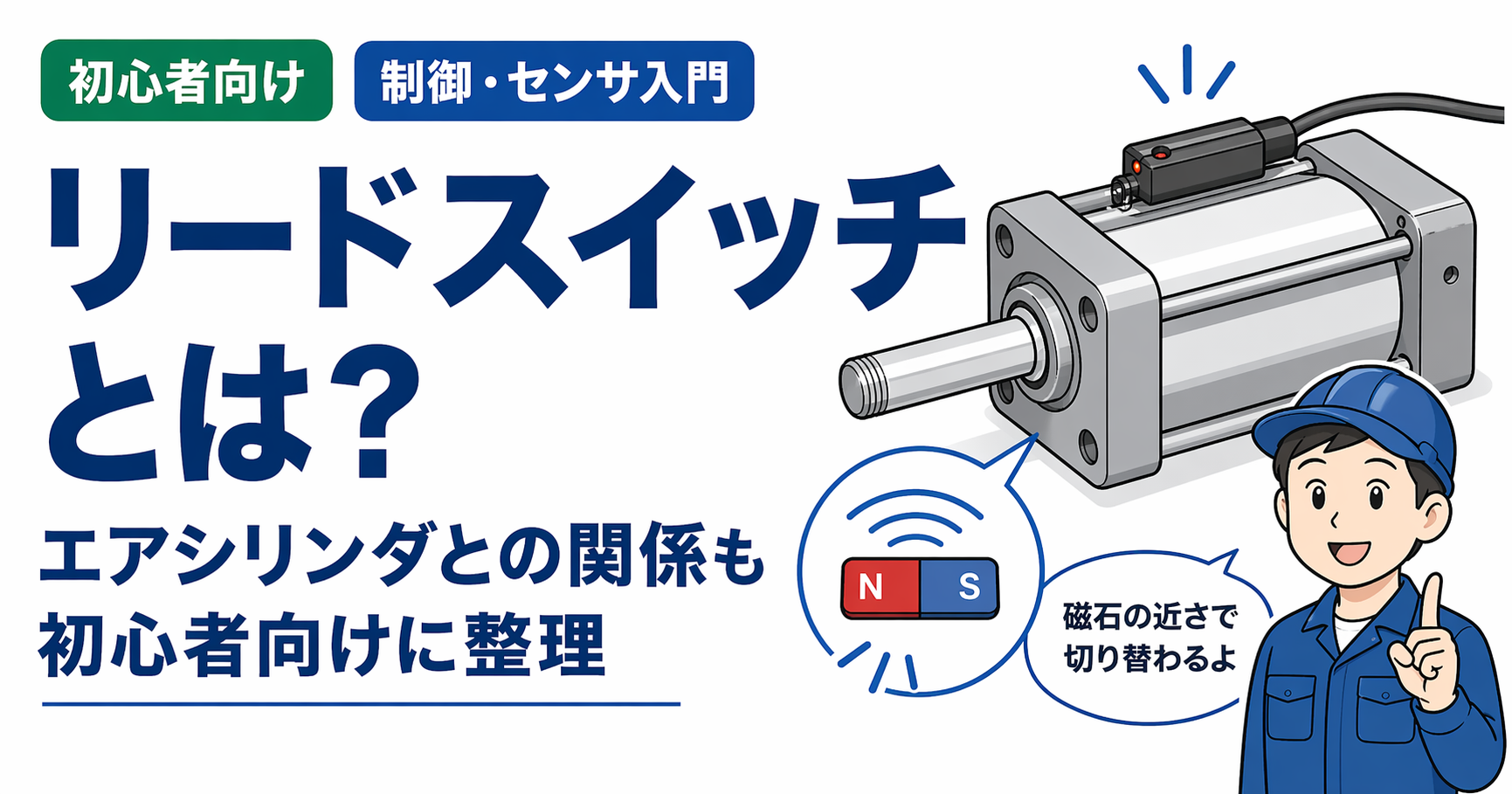
エアシリンダーは、空気圧で前進・後退するシンプルな動きが得意です。構造も比較的分かりやすく、前進端・後退端のリードスイッチで位置確認する場面が多いです。
一方でロボシリンダーは、電動で動くため、複数位置への移動、速度変更、途中停止、押付け動作などを扱いやすくなります。その分、信号や設定を見るポイントは増えます。

| 項目 | エアシリンダー | ロボシリンダー |
|---|---|---|
| 動力 | 空気圧 | モーター・電気 |
| 基本の動き | 前進・後退が中心 | 指定位置へ移動、途中停止、速度調整がしやすい |
| 位置確認 | リードスイッチや近接センサで端位置を見ることが多い | 位置データ、完了信号、原点復帰完了などで見る |
| 調整 | スピコン、ストッパ、センサ位置などで調整 | 位置、速度、加減速、押付け条件などを設定で調整 |
| 現場で見る信号 | 電磁弁、前進端、後退端など | 位置No、起動、移動中、完了、原点、アラームなど |
| 向いている場面 | 単純な押す・引く動作 | 位置を変えたい、速度を変えたい、条件で動きを分けたい場面 |
先輩エアシリンダーは「前進したか、後退したか」を見ることが多いけど、ロボシリンダーは「どの位置に、どの条件で動いたか」まで見る感じだね。
後輩だから位置Noとか完了信号が出てくるんですね。エアシリンダーより、見る信号が少し多いんですね。
ロボシリンダーを見る時に大事なのは、機械本体の動きだけではありません。PLCとコントローラの間で、どんな信号をやり取りしているかを見ることが重要です。
現場でよく見る流れは、PLCから「どの位置へ動くか」「動作を開始するか」を出し、ロボシリンダー側から「動作が終わったか」「アラームが出ていないか」を返す形です。

PLC側から、どの位置データで動かすかを指定します。複数位置を使う設備では、ここを間違えると違う位置へ動きます。
位置Noを指定したうえで、スタート信号を出してロボシリンダーを動かします。起動条件がそろっていないと動きません。
指定位置まで動いたら、位置決め完了信号などが返ります。次工程へ進む条件として使われることが多いです。
アラームや異常信号が出ている場合、起動できない、途中で止まる、復旧操作が必要になることがあります。
PLC側のラダーを見る時は、位置Noや起動信号のようにPLCから出す信号と、完了やアラームのように戻ってくる信号を分けると追いやすいです。
先輩ロボシリンダーは、動いている本体だけを見るより、PLCから何を指令して、何の完了信号を待っているかを見ると追いやすいよ。
後輩動かない時も、本体が悪いと決めつけずに、PLCから起動信号が出ているか、完了待ちになっていないかを見るんですね。
ロボシリンダーでは、原点復帰と位置Noの考え方が大切です。エアシリンダーだけを見てきた人は、ここで少し戸惑いやすいかもしれません。
原点復帰は、ロボシリンダーが自分の基準位置を確認する動作です。設備によっては、電源投入後やアラーム復旧後に原点復帰が完了していないと、通常動作に進めないことがあります。
位置Noは、あらかじめ登録された動作位置の番号です。たとえば、位置No.1は待機位置、位置No.2は押付け位置、位置No.3は退避位置のように使うことがあります。
ロボシリンダーが基準位置を確認する動作です。原点復帰完了がないと、位置決め動作に進めない場合があります。
どの登録位置へ動かすかを指定する番号です。PLCから複数ビットで選ぶ場合もあります。
指定した位置へ到達したことを示す戻り信号です。次工程の開始条件になることがあります。
アラーム解除や状態復旧で使う信号です。ただし原因を見ずにリセットだけ繰り返すのは避けます。

ロボシリンダーが「自分の基準位置を分かっている状態」にしてから、指定された位置へ動くと考えるとイメージしやすいです。
ロボシリンダーが動かない時や、動いたのに次工程へ進まない時は、いきなり本体交換や細かい設定を疑う前に、信号の流れを順番に確認します。
特に多いのは、起動条件がそろっていない、原点復帰が完了していない、位置Noが違う、完了信号が返っていない、アラームが出ている、機械的に引っかかっている、といったパターンです。
コントローラ電源、非常停止、安全回路、サーボON条件など、そもそも動ける状態かを見ます。
原点復帰が必要な設備では、原点復帰完了がないと通常動作へ進めないことがあります。
PLCから正しい位置Noが出ているか、起動信号が出ているかを確認します。
動いたのに次工程へ進まない場合、PLC側が完了信号待ちになっていることがあります。
アラームが出ている場合は、内容を確認します。過負荷、位置偏差、原点未完了、外部停止などが関係することがあります。
ガイド抵抗、ワークの噛み込み、ストッパ干渉など、電気ではなく機械側が原因のこともあります。

アラームをリセットして動いたとしても、過負荷や干渉の原因が残っていると再発します。何が原因で止まったのかを確認することが大切です。
後輩ロボシリンダーが止まっていたら、まずアラームをリセットすればいいんですか?
先輩リセットする前に、何のアラームか、どの動作中に止まったかを見たいね。原因を見ずにリセットだけすると、同じところでまた止まることがあるよ。
IAIロボシリンダーは、モーターで動く電動アクチュエータで、エアシリンダーよりも位置決めや速度調整をしやすい機器です。
現場では、シリンダー本体だけでなく、コントローラ、PLCからの指令、位置No、起動信号、完了信号、原点復帰、アラームまでセットで見ると理解しやすくなります。
特にトラブル時は、「PLCから指令が出ているか」「原点復帰は完了しているか」「正しい位置Noか」「完了信号は返っているか」「アラームはないか」を順番に確認するのが大切です。
ロボシリンダーを見る時は、「何を動かすか」「どの位置Noか」「起動信号は出ているか」「完了信号は返っているか」「アラームはないか」を順番に確認します。