What is a servo motor?
A servo motor is a motor used for controlled movement, especially when the machine needs to stop at a specific position.
In factory automation, servo motors are often used for positioning tables, robot axes, feeders, presses, packaging machines, and any mechanism that must move by a controlled amount.
The motor itself is only one part of the system. A typical servo system also includes a servo amplifier, encoder feedback, controller commands, power wiring, and mechanical load.
Main parts of a servo system
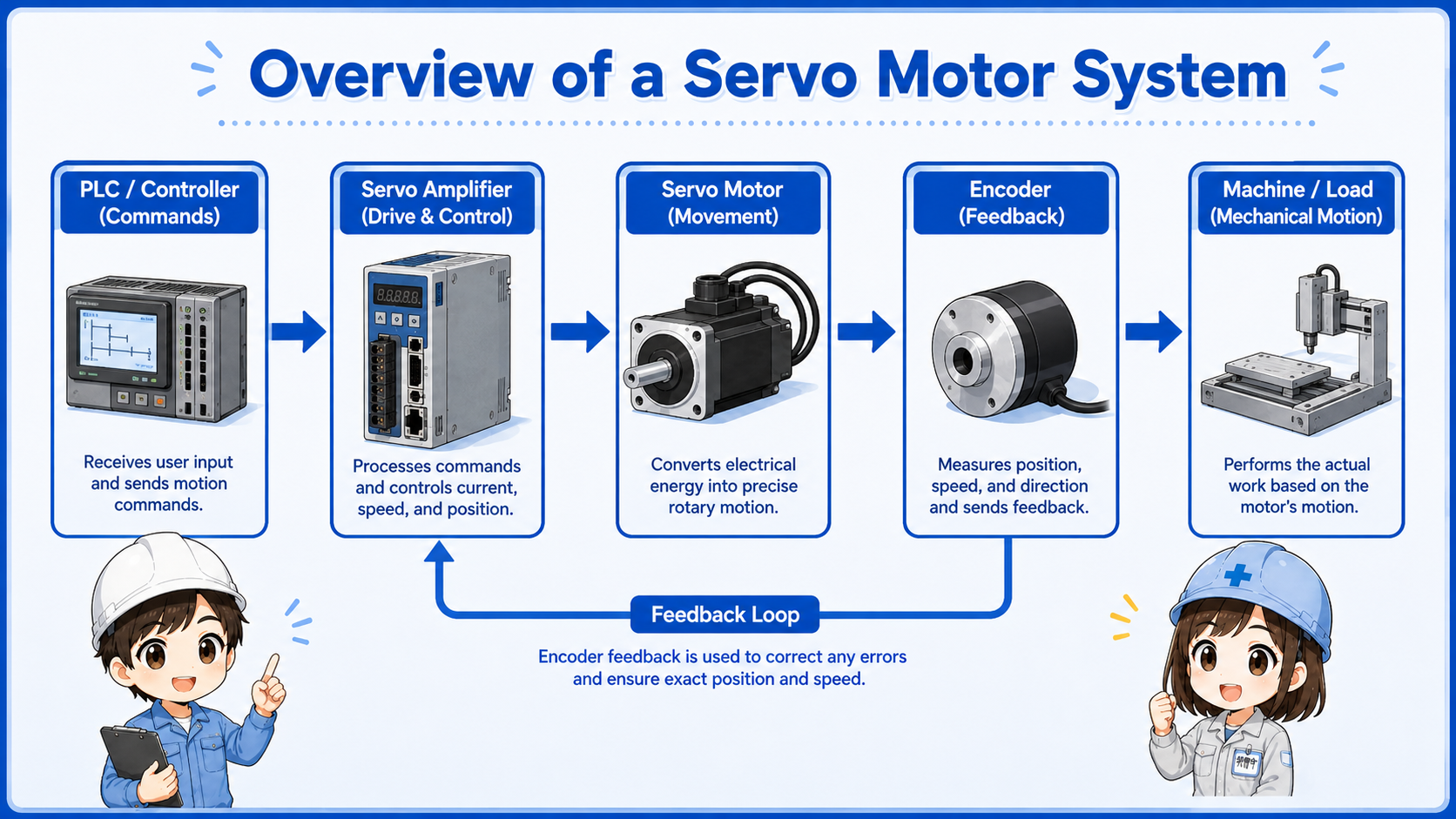
A servo system is easier to understand when you separate command, amplifier, motor, feedback, and mechanism.
The PLC or motion controller sends commands. The servo amplifier converts those commands into motor drive power. The servo motor moves the mechanism. The encoder feedback tells the amplifier or controller how much the motor actually moved.

| Part | Basic role | Common field check |
|---|---|---|
| Controller / PLC | Sends movement commands, start signals, speed commands, or position targets. | Check command output, operation condition, sequence step, and communication status. |
| Servo amplifier | Drives the servo motor and monitors feedback, alarms, and control status. | Check power, enable signal, alarm code, parameters, and wiring. |
| Servo motor and encoder | Moves the mechanism and returns actual position feedback. | Check motor cable, encoder cable, connector, mechanical load, and abnormal noise. |
Positioning control in simple terms
Positioning control means moving to a target position, not just turning the motor on.
With an ordinary motor, the main command is often “run” or “stop.” With a servo motor, the system usually controls how far to move, how fast to move, and where to stop.
For example, a machine may command a table to move 100 mm forward, stop at a fixed position, wait for the next process, and then return to the home position.
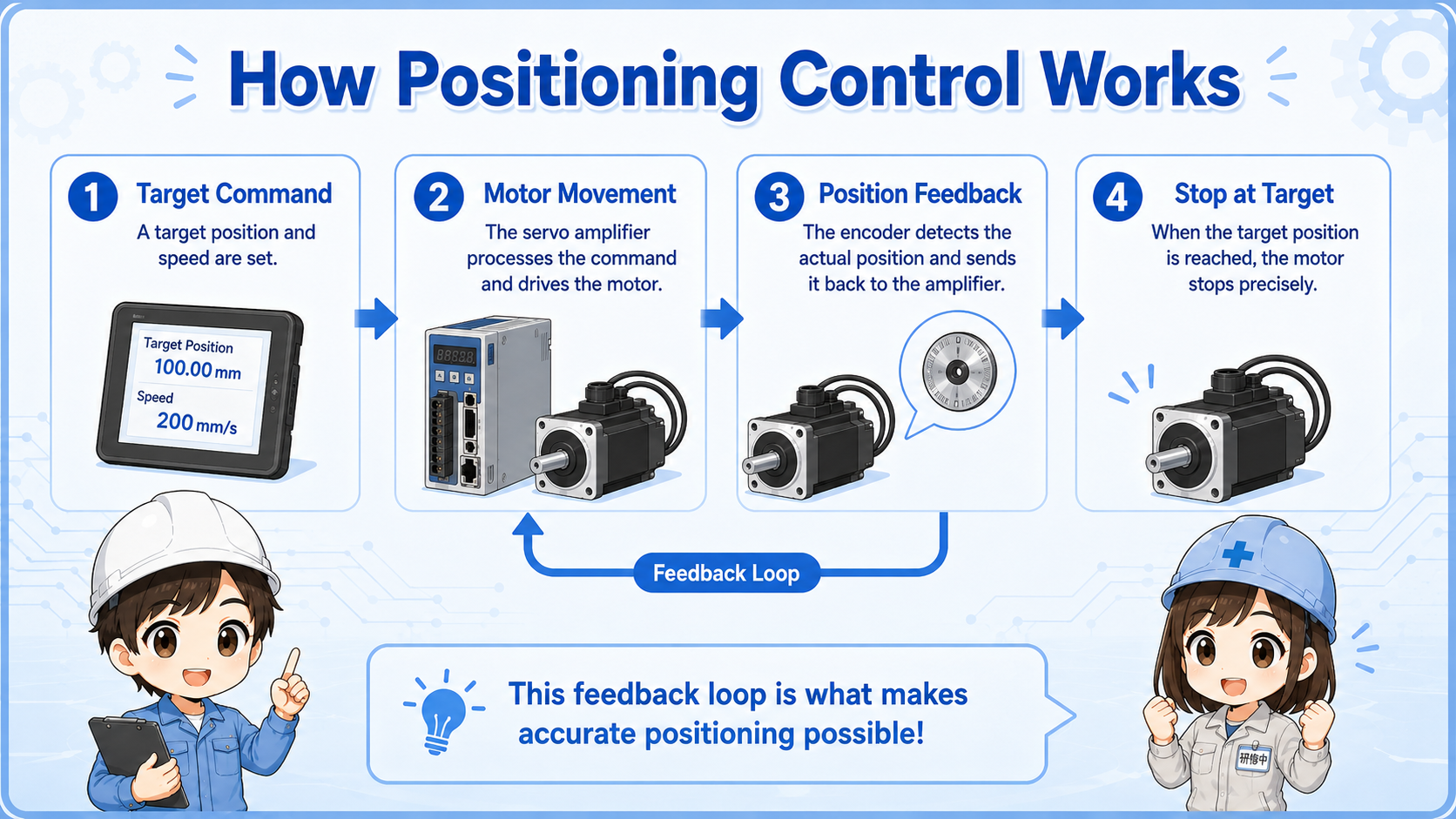
1. Target command
The controller sends a target position, speed, or motion command.
2. Motor movement
The servo amplifier drives the motor toward the target.
3. Position feedback
The encoder confirms whether the actual position reached the target.
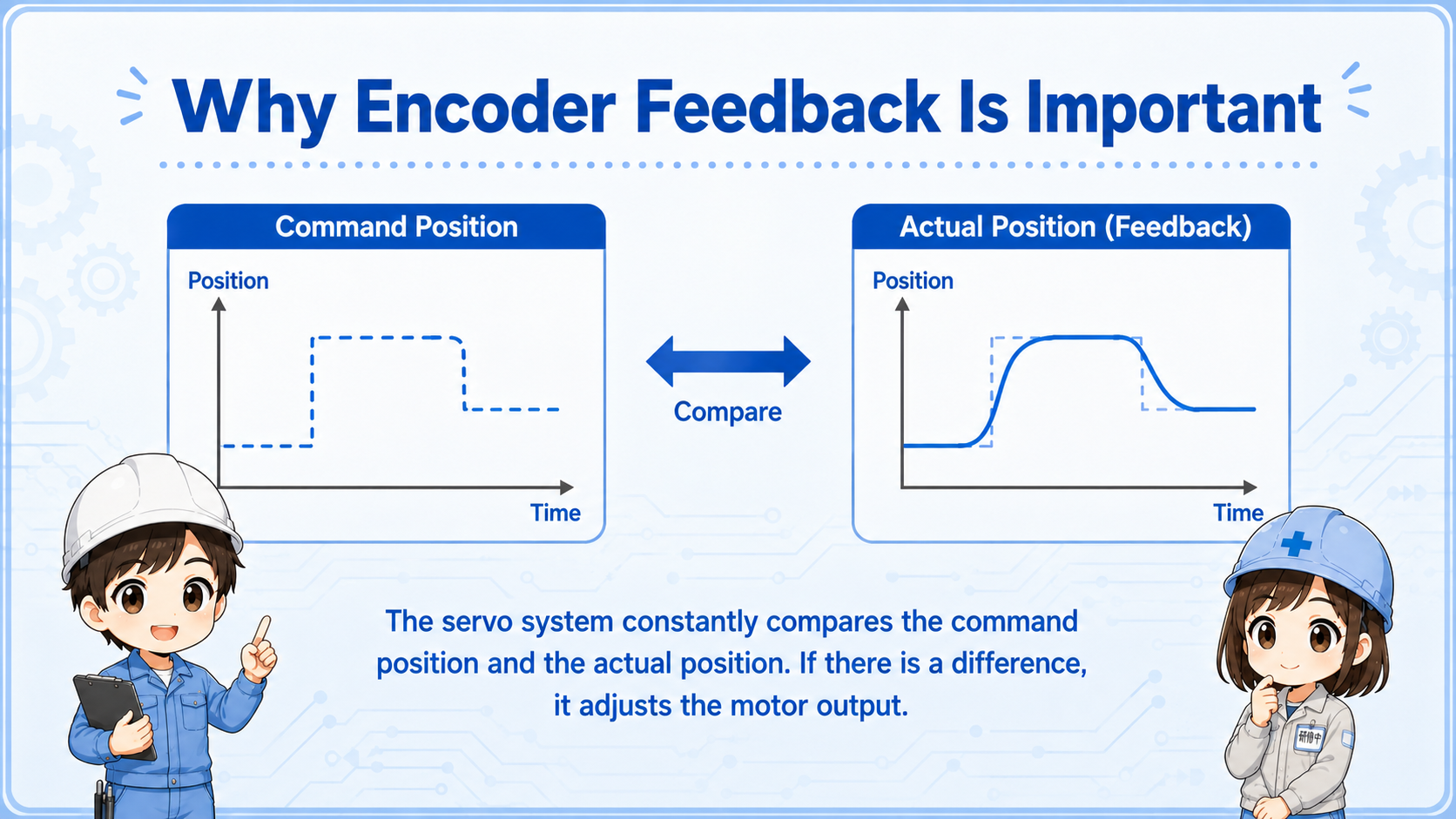
Why encoder feedback is important
Encoder feedback is what lets the servo system know the actual motor position.
The encoder is attached to the motor and sends position information back to the servo amplifier or controller. This feedback allows the servo system to compare the commanded position with the actual position.
If the motor does not move as commanded, the servo system may detect a position error, overload, encoder error, or following error depending on the situation.
Servo control is not one-way
A servo system does not simply send power to a motor. It compares command and feedback, then adjusts the motor output to follow the target.
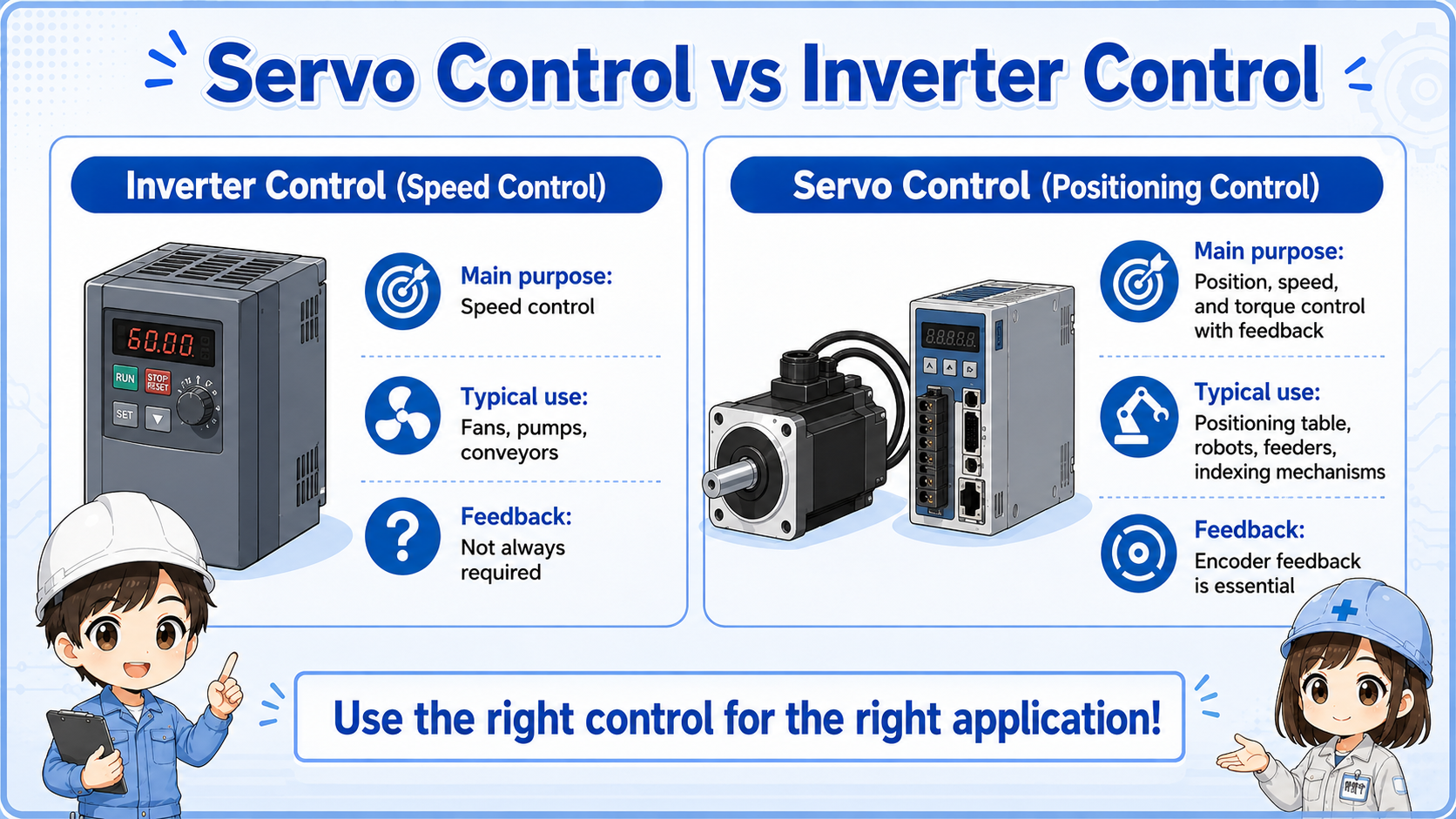
Servo motor vs inverter motor control
Both can control motors, but their purpose is different.
An inverter is often used to control motor speed. A servo system is often used when accurate positioning, fast response, and feedback-based control are needed.
In real machines, both are important. A fan or conveyor may use an inverter, while a positioning table or robot axis may use a servo.
| Item | Inverter control | Servo control |
|---|---|---|
| Main purpose | Speed control of a motor. | Position, speed, and torque control with feedback. |
| Typical use | Fans, pumps, conveyors, simple speed adjustment. | Positioning table, robot axis, feeder, indexing mechanism. |
| Feedback | May be simple or not required depending on application. | Encoder feedback is a key part of the system. |
Origin return and position reference
A positioning system needs a reference point so it knows where the machine position starts.
Many servo systems perform origin return, also called homing. The machine moves toward a sensor, mechanical reference, or preset position, then sets that point as the reference for future positioning.
If origin return fails, the machine may not start automatic operation, or the position may be shifted from where it should be.

Position errors are not always electrical
If the stop position is shifted, also check mechanical looseness, coupling slip, sensor position, origin setting, and load condition.
Field check points
Servo problems should be checked from both the electrical side and mechanical side.
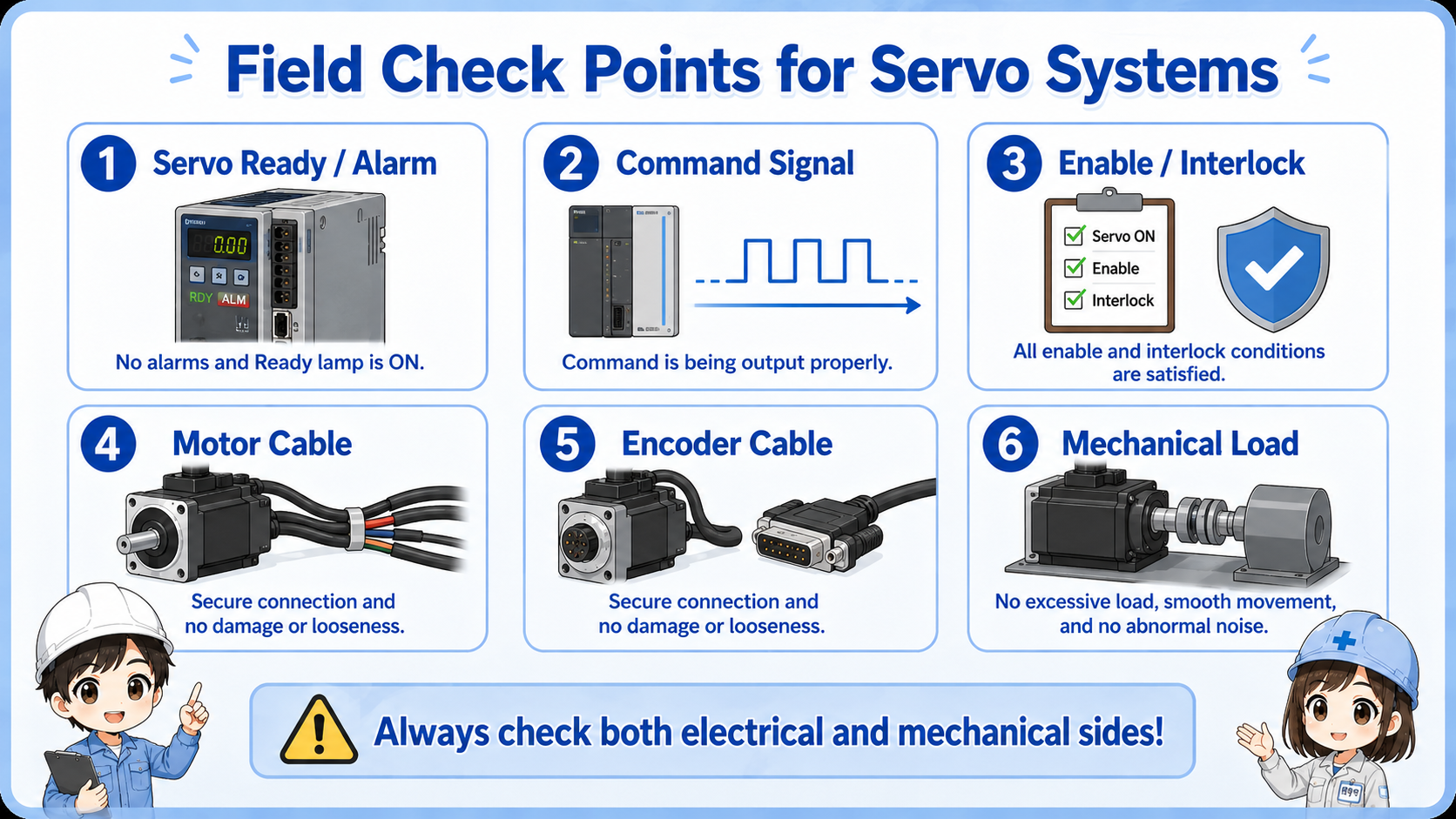
Servo ready / alarm
Check whether the amplifier is ready and whether an alarm code is displayed.
Command signal
Confirm that the PLC, motion controller, or HMI is actually sending a move command.
Motor and encoder cable
Check connector seating, cable damage, shielding, and wiring route.
Mechanical load
Check for binding, excessive load, loose coupling, abnormal noise, or unexpected friction.
Origin return
Check origin sensor, home direction, dog position, and origin completion signal.
Parameter and sequence
Confirm basic parameter settings, operation mode, interlocks, and step conditions.
Short conversation

A servo motor is used when the machine needs controlled movement, especially accurate positioning.

So it is not just a motor that turns on and off?
Right. The amplifier drives the motor while checking encoder feedback, so it can follow a target position.
If a servo alarm appears, should I check only the amplifier?
No. Also check motor cable, encoder cable, command condition, mechanical load, and whether the axis can move smoothly.
Summary
A servo motor is used when a machine needs accurate movement such as positioning, fast response, or feedback-based control. The servo amplifier, motor, encoder, controller, and mechanical load all work together.
When checking a servo problem, separate the issue into command, amplifier status, alarm code, motor cable, encoder cable, origin return, and mechanical load. Servo troubleshooting is both electrical and mechanical.