原点復帰回路の全体像
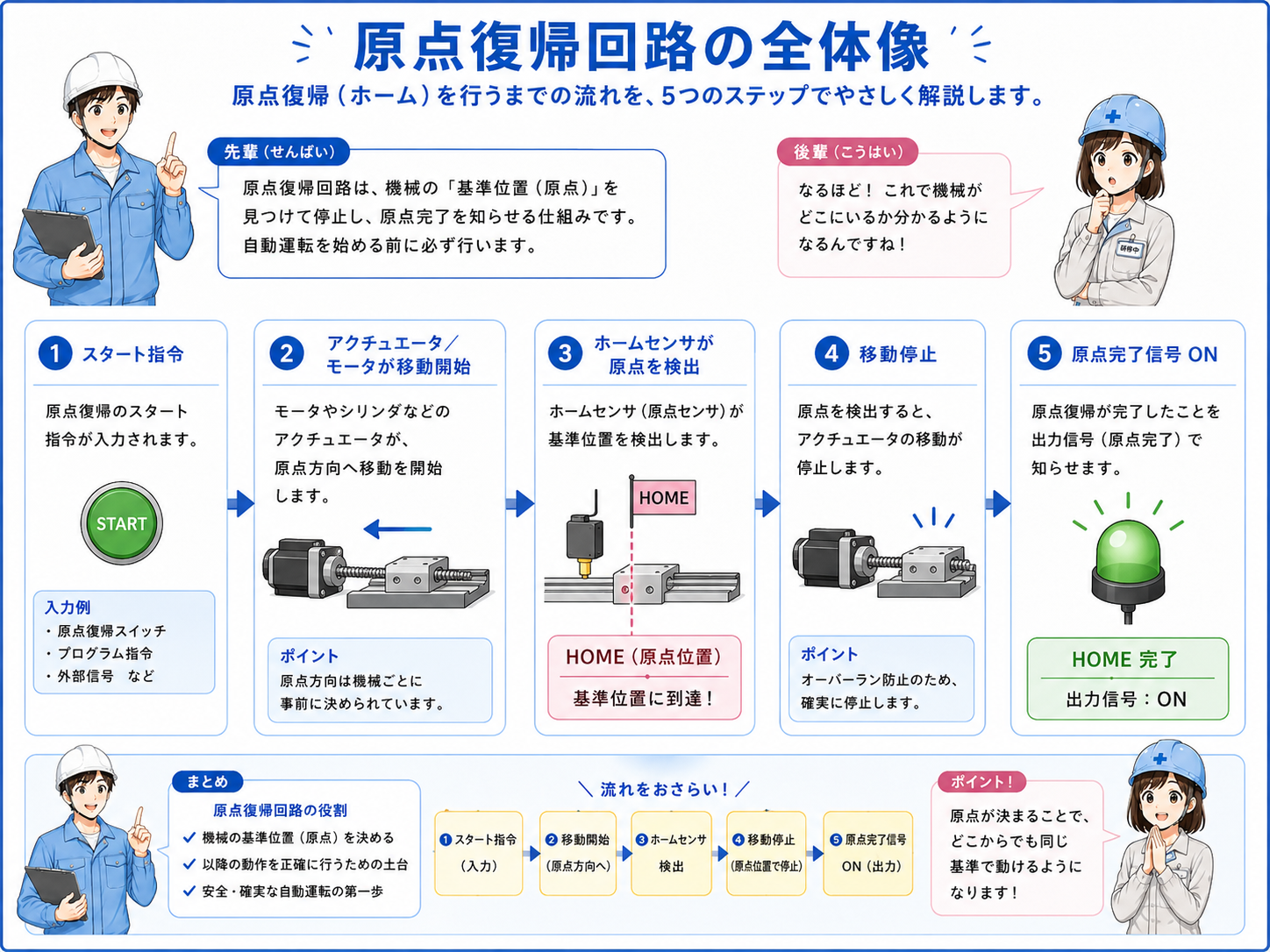
原点復帰回路は、設備や機構を決められた基準位置へ戻すための回路です。 原点位置を検出するセンサーやリミットスイッチを使い、そこまで戻ったら原点復帰完了として扱います。
設備は停止中や異常後に、どの位置にいるか分からなくなることがあります。 その状態のまま自動運転を始めると、想定外の動きになる可能性があります。 そこで、自動運転前に原点へ戻して、位置の基準をそろえる考え方が使われます。
原点復帰は「今どこにいるか」をそろえるための準備動作
自動運転は、設備の開始位置がそろっている前提で作られることが多いです。 原点復帰を入れることで、運転前に位置の基準を合わせやすくなります。

先輩原点復帰は、設備を「いつものスタート位置」に戻すための動きだよ。自動運転の前準備として大事なんだ。

後輩原点に戻してから動かすことで、位置のズレを減らせるんですね。
原点復帰の基本動作
原点復帰の基本は、原点復帰開始指令を受けたら、決められた方向へ動かし、原点センサーが入ったら停止して完了フラグを立てる流れです。 原点方向へ戻す動きは、設備によって前進、後退、上昇、下降などさまざまです。
重要なのは、原点センサーだけを見るのではなく、戻す方向、速度、停止条件、異常条件をセットで見ることです。 原点に戻る途中で上限・下限や異常条件に当たる場合もあるため、許可条件を整理しておきます。
原点復帰開始
操作PB、自動運転前処理、復旧操作などで原点復帰を開始します。
戻り方向
原点へ向かう方向を決めます。後退、下降、戻りなど設備ごとに違います。
原点センサー
原点位置に到達したことを検出する入力です。
原点復帰完了
原点センサー確認後に、完了フラグをONして次の運転条件に使います。
完了フラグを作ると自動運転条件に使いやすい
原点復帰が終わったことを内部リレーで残しておくと、自動運転開始条件に使えます。 「原点復帰完了していないと自動運転に入れない」という条件を作ると、動作の前提が分かりやすくなります。
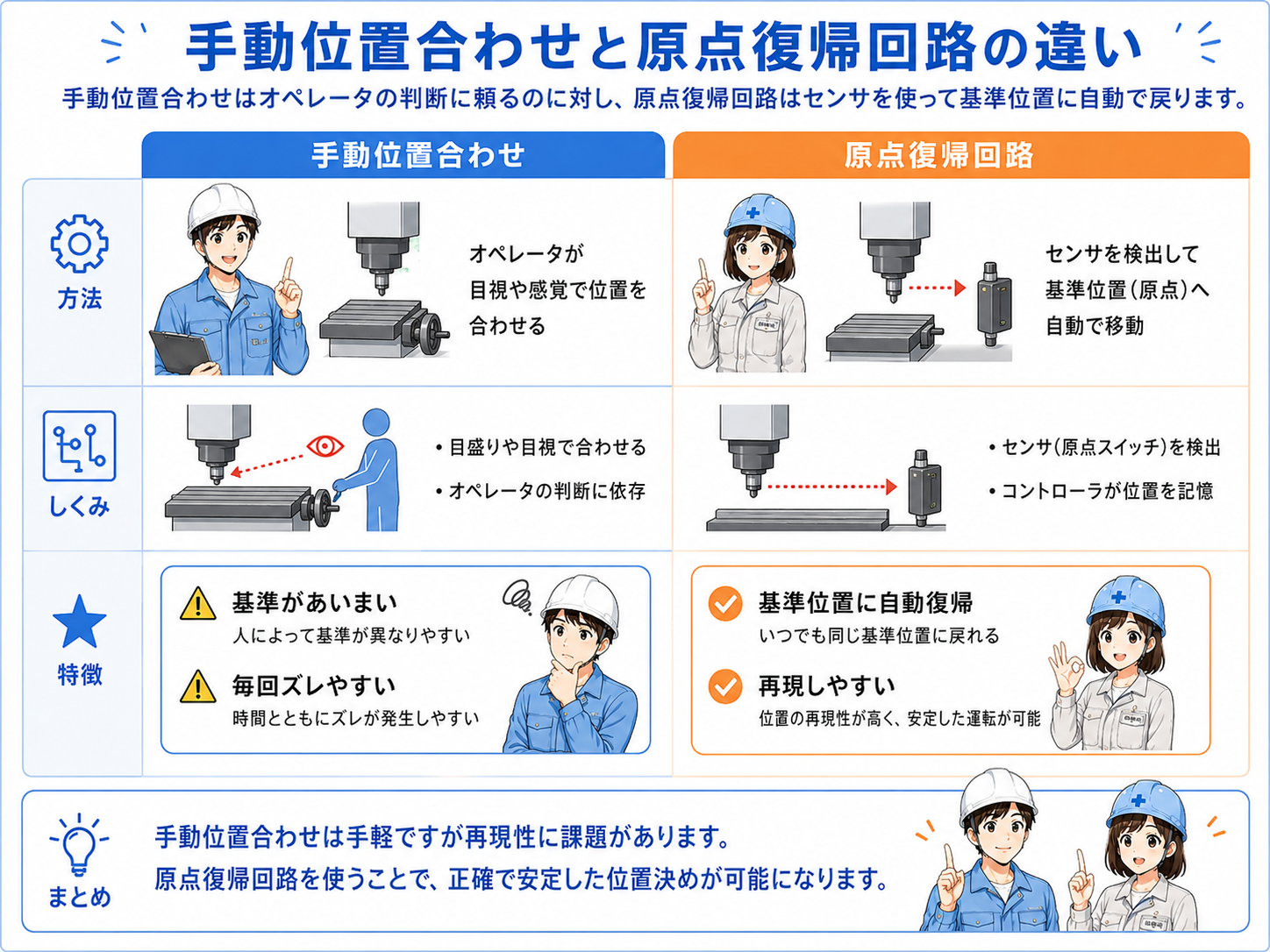
手動操作との違い
原点復帰は、手動でただ戻す操作とは少し違います。 手動操作は作業者が見ながら動かす操作ですが、原点復帰回路では、開始指令後に原点センサーを見て、完了条件まで自動的に進めることがあります。
ただし、設備によっては手動モード中だけ原点復帰を許可したり、ジョグ操作で原点付近まで動かしてから原点復帰する場合もあります。 手動操作、ジョグ運転、原点復帰の役割を分けて考えると整理しやすいです。
| 項目 | 手動操作 | 原点復帰回路 |
|---|---|---|
| 主な目的 | 作業者が任意に動かす | 基準位置へ戻す |
| 操作の考え方 | 押している間だけ、または指令した方向へ動かす | 原点センサーを目標にして戻す |
| 完了条件 | 作業者の判断で止めることが多い | 原点センサーON、停止確認、完了フラグONなど |
| 自動運転との関係 | 調整・復旧操作として使う | 自動運転開始前の前提条件に使うことが多い |
原点復帰は「戻すだけ」ではなく「完了を作る」まで見る
原点センサーに当たって止まるだけでなく、原点復帰完了フラグをどう作るかが大切です。 完了フラグがあると、自動運転開始条件や異常復旧条件に使いやすくなります。
簡略ラダー例
原点復帰回路を簡略化すると、原点復帰開始指令で戻り出力をONし、原点センサーが入ったら戻り出力を止めて、原点復帰完了フラグをONする流れになります。 ここでは考え方を追いやすいように、シンプルな形で表しています。
この例では、原点センサーが入っていない時だけ戻り出力を出しています。 原点センサーが入ったら戻り出力を止め、原点復帰完了フラグをONします。
原点復帰中・原点復帰完了を分けて見る
原点復帰中は「今戻っている状態」、原点復帰完了は「基準位置へ戻った状態」です。 この2つを分けておくと、自動運転開始条件や異常処理を整理しやすくなります。
現場での確認ポイント
原点復帰がうまくいかない時は、原点復帰開始、戻り方向、原点センサー、戻り出力、完了フラグを順番に見ます。 「動かない」「戻り続ける」「完了にならない」など、症状によって見る場所が変わります。
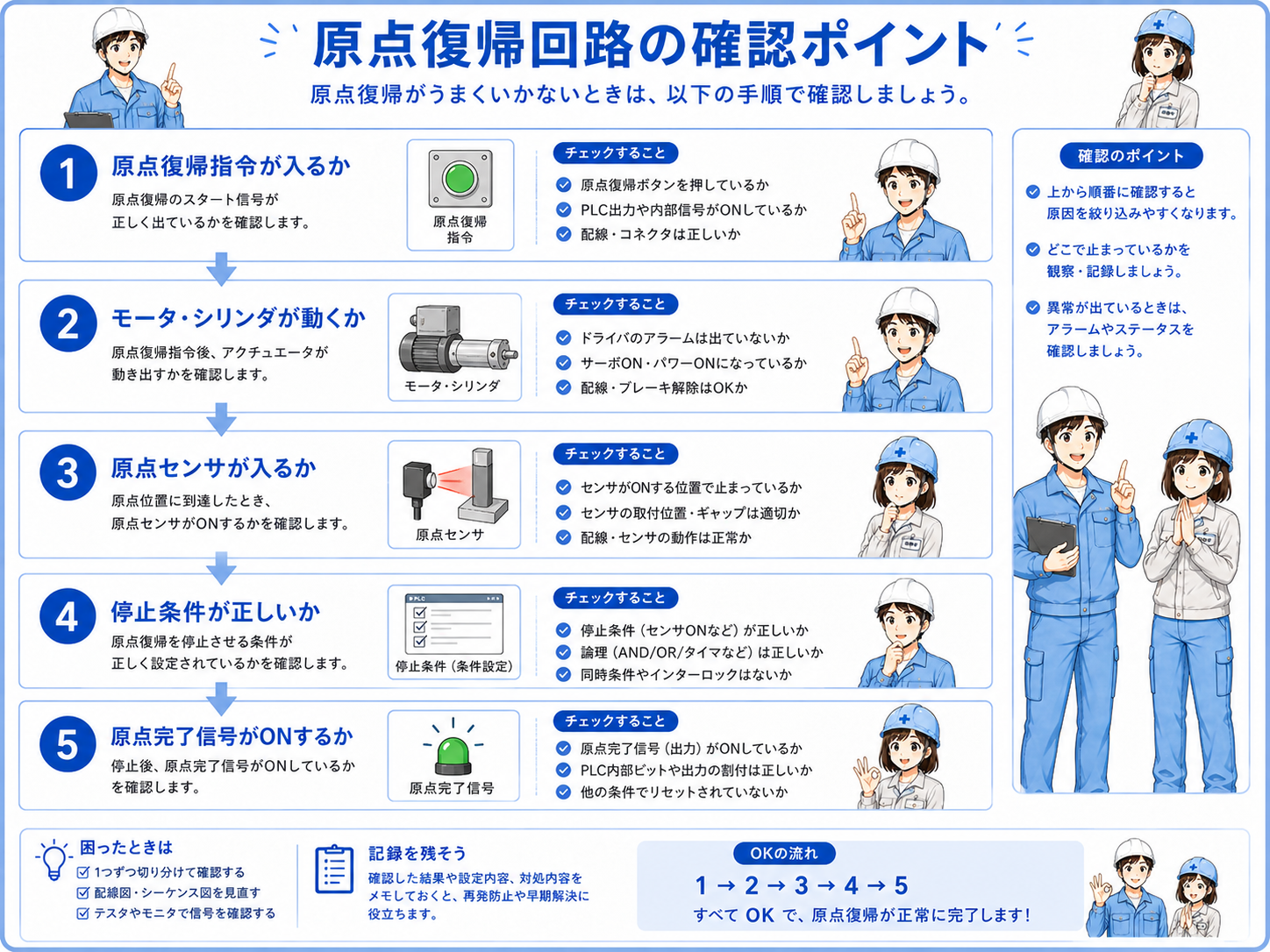
原点復帰開始が入っているか
PB入力や開始フラグがONしているか、入力モニタで確認します。
戻り方向が合っているか
原点へ向かう方向に出力しているか、動作方向を確認します。
原点センサーが入るか
原点位置でセンサー入力が変化するか、取付位置や入力状態を見ます。
戻り出力が止まるか
原点センサーが入った後、戻り出力がOFFするか確認します。
完了フラグが立つか
原点復帰完了フラグがONし、自動運転条件に使える状態か確認します。
異常時に止まるか
復帰途中の異常、リミット、非常停止で戻り出力が止まるか確認します。
原点復帰中も安全確認は必要
原点復帰は自動的に設備を動かすことがあります。 実機では可動部、挟まれ、干渉、非常停止、安全扉、社内手順、メーカー資料を確認したうえで作業してください。
まとめ
原点復帰回路は、設備を決められた基準位置へ戻すための基本回路です。 原点センサーを見ながら戻り方向へ動かし、原点に到達したら停止して、原点復帰完了フラグを作ります。
手動操作やジョグ運転と似て見える場面もありますが、原点復帰は「基準位置をそろえる」ことが目的です。 自動運転前や異常復旧後に、原点復帰完了を条件として使うと、設備の開始位置を整理しやすくなります。
- 原点復帰回路は、設備を基準位置へ戻す回路
- 原点センサーを見ながら戻り出力を制御する
- 原点到達後は、原点復帰完了フラグを作ると分かりやすい
- 手動操作やジョグ運転とは目的を分けて考える
- 原点復帰中も安全条件・異常条件を必ず確認する