What is a home return circuit?
A home return circuit moves a machine part back to a known reference position.
In many machines, an axis, table, cylinder, conveyor stopper, or moving unit needs a known starting point. This known point is often called the home position, origin position, or reference position.
The purpose of home return is to make the machine state clear before automatic operation. If the machine does not know where the moving part is, the next automatic step may move in the wrong direction or stop at the wrong position.
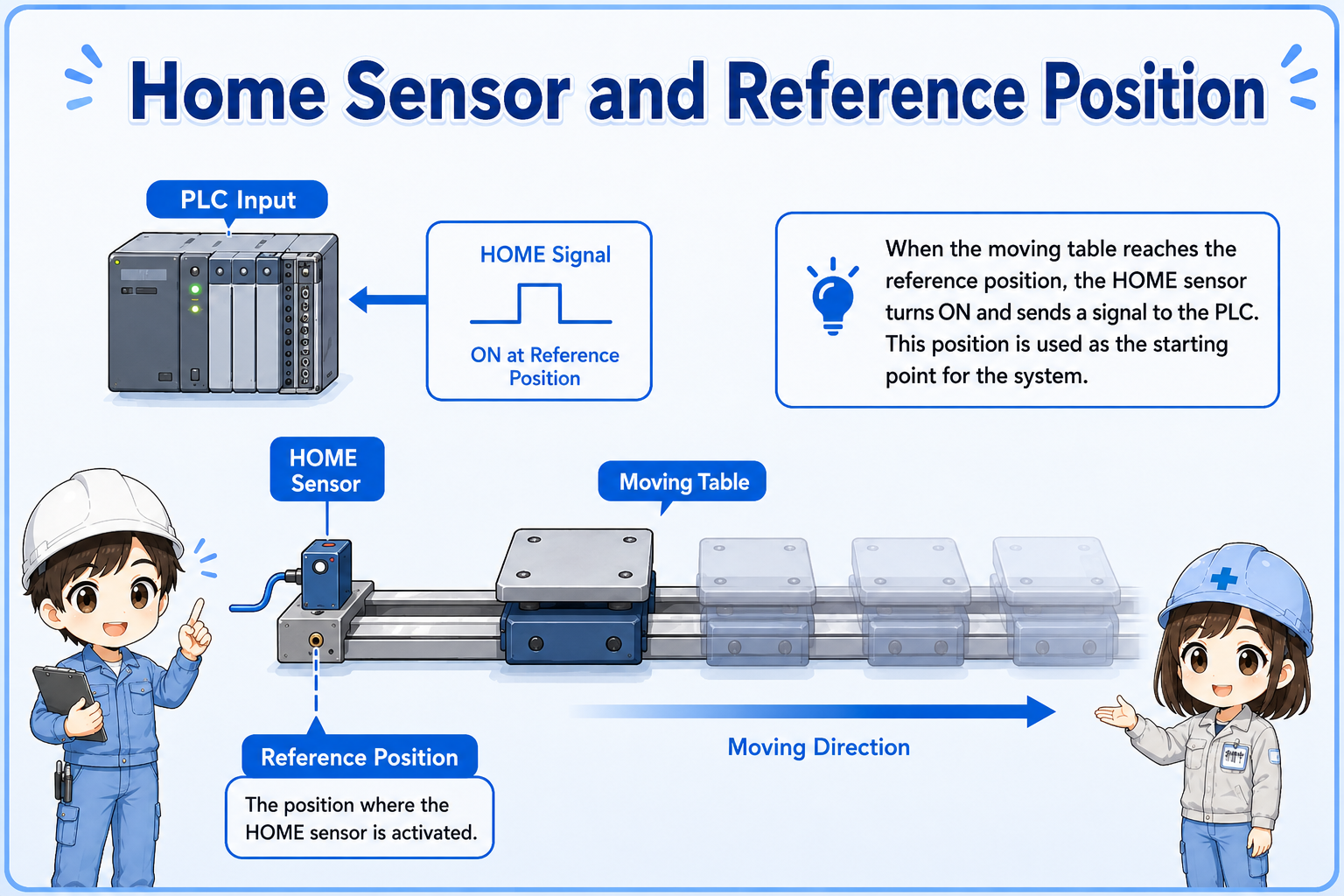
The role of the home sensor
The home sensor tells the PLC that the moving part has reached the reference area.
A home sensor may be a limit switch, proximity sensor, photoelectric sensor, reed switch, or other position detection device. The important point is not the sensor type itself, but what the signal means in the sequence.
In a simple circuit, the machine moves in the return direction until the home sensor turns ON. Then the movement output turns OFF and a home complete bit may be set.
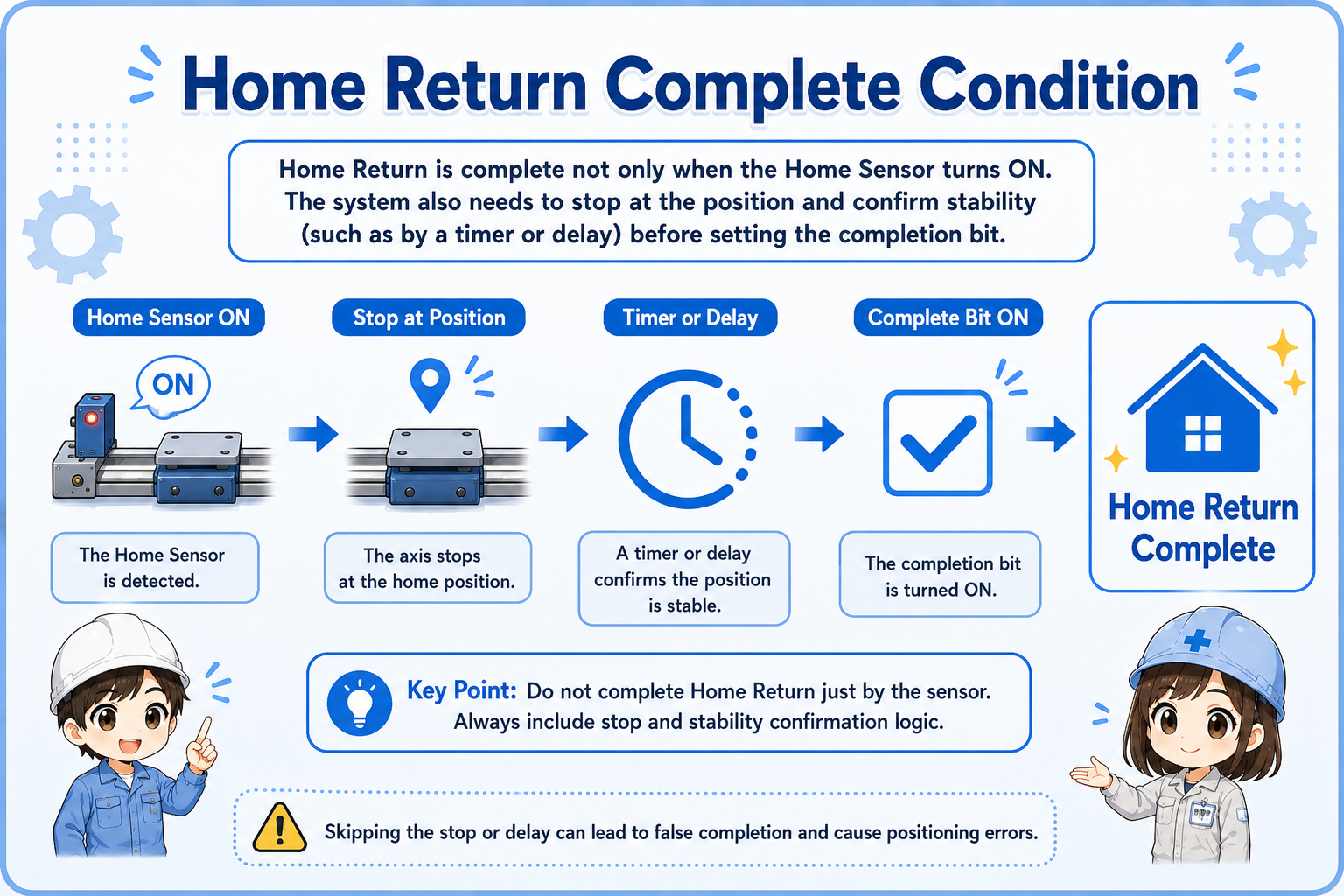
Sensor ON is not always the same as complete
In some machines, the home complete condition may require the sensor to turn ON, movement to stop, a timer to finish, or a confirmation bit to be set. Do not assume that sensor ON alone always means the sequence is complete.
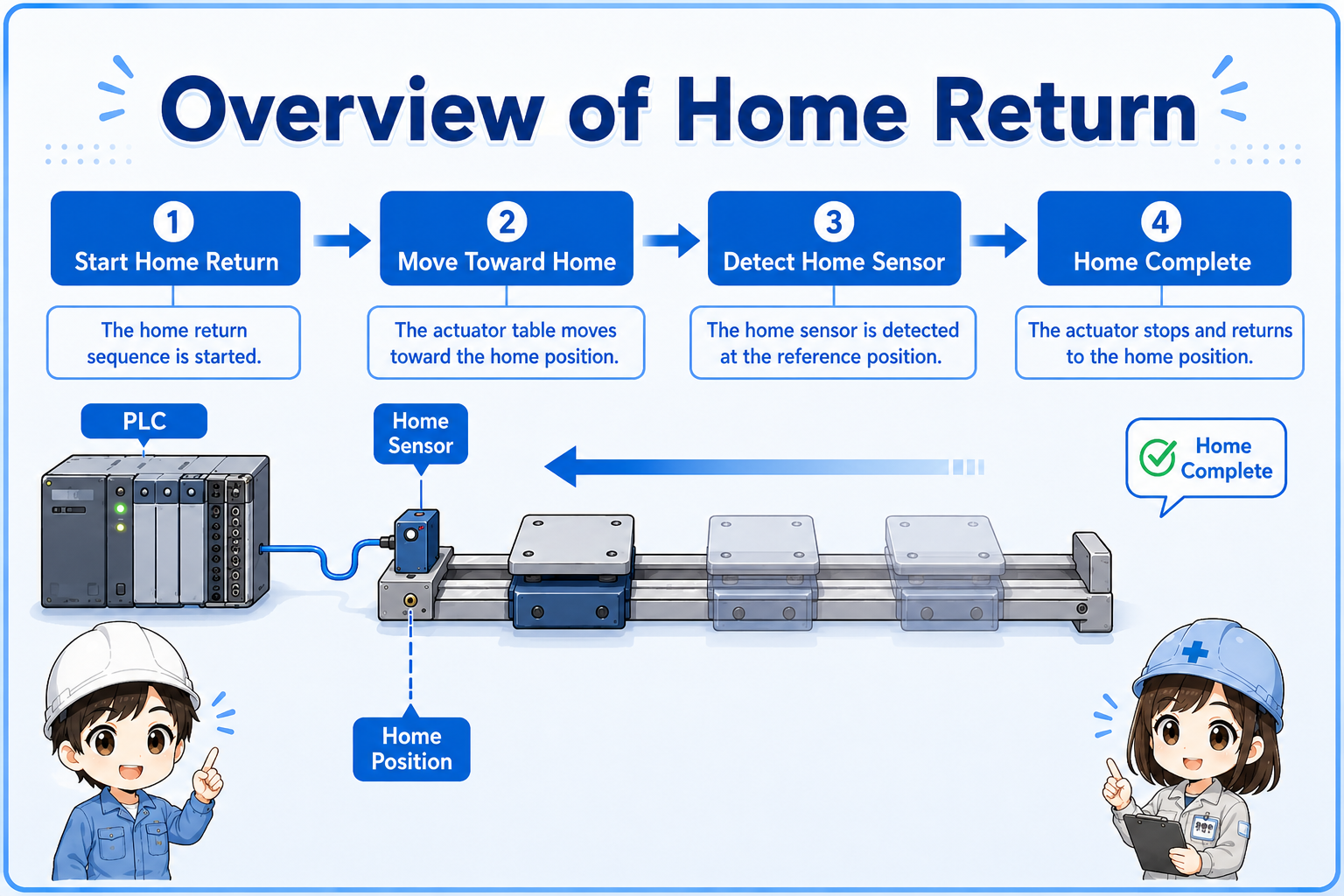
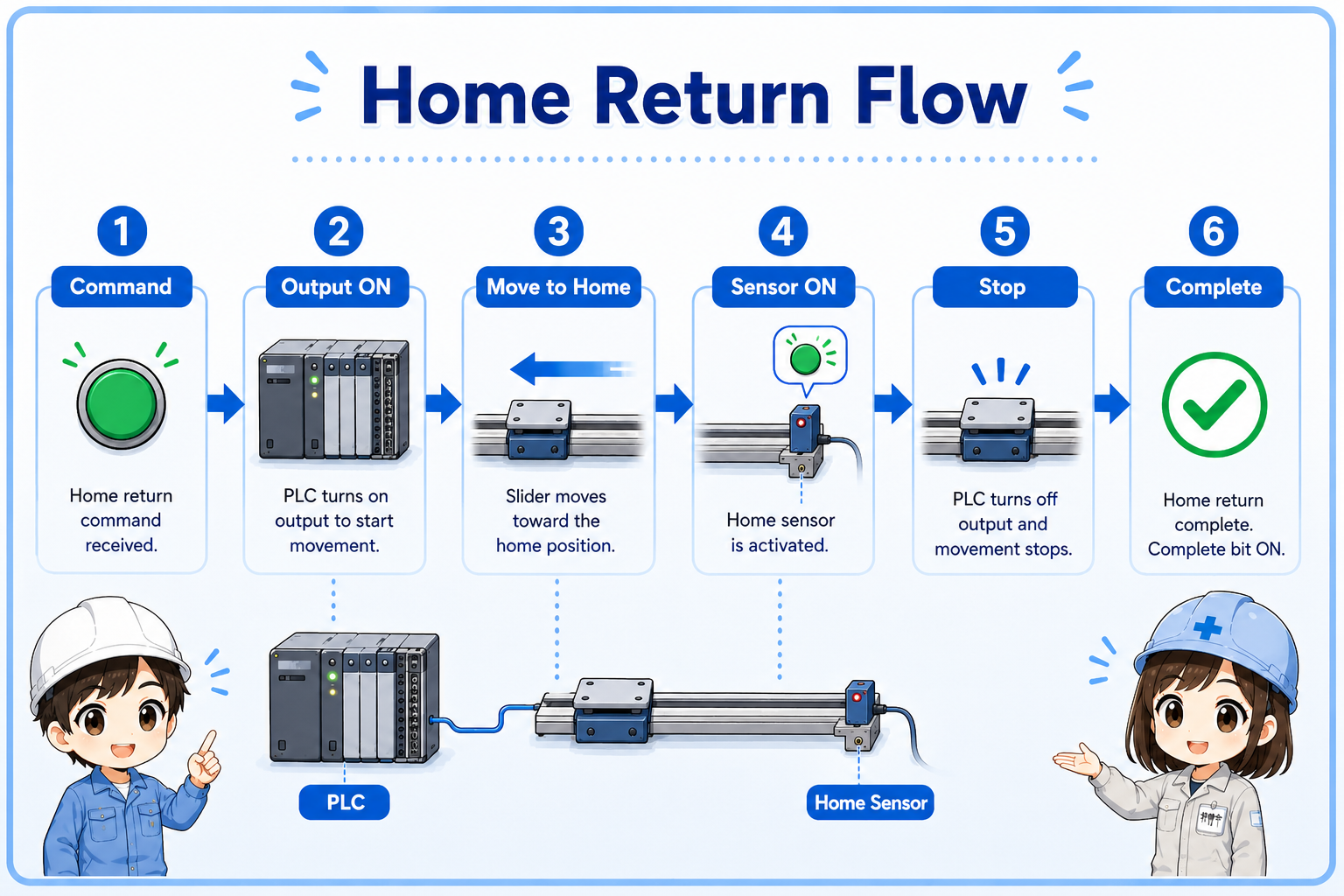
Basic home return flow
A home return circuit is easier to understand when you separate command, movement, detection, and completion.
1. Start command
The operator or sequence starts the home return operation.
2. Move to home
The machine moves in the return direction while conditions are safe.
3. Complete
The home sensor is detected and the home complete condition is set.
Home return complete condition
The complete condition should tell the rest of the program that the machine is ready to continue.
The home complete bit is often used as a permission for automatic operation. If home return has not been completed, the automatic cycle may be blocked or an alarm may be shown.
A clear complete condition helps the next person troubleshoot the machine. It also prevents a sequence from starting while the machine position is unknown.
| Signal / condition | Role | Typical check |
|---|---|---|
| Home return command | Starts the return operation. | Check push button, HMI command, or internal sequence bit. |
| Home sensor | Detects the reference position. | Check sensor signal, wiring, PLC input, and mechanical position. |
| Home complete bit | Confirms the machine is ready for the next operation. | Check whether it is set after movement stops and conditions are satisfied. |
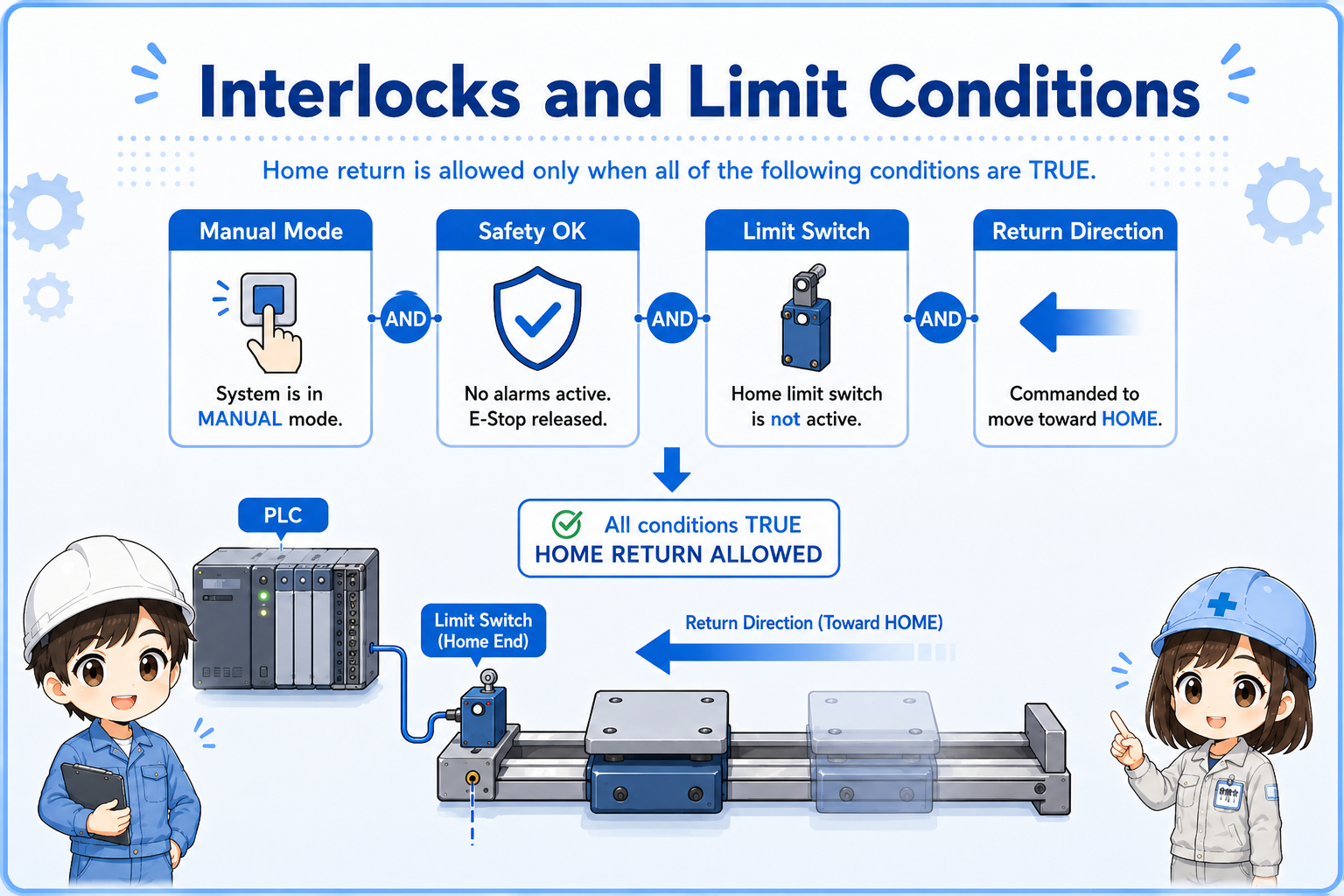
Interlocks and limit conditions
A home return circuit should not move blindly toward the reference position.
Even during home return, the machine should respect safety conditions, mode conditions, limit switches, and direction interlocks. For example, movement may be allowed only in manual mode or only when an emergency stop condition is cleared.
A lower limit, upper limit, mechanical stopper, or overtravel condition may also affect the return direction. If the wrong direction is commanded, the machine may move away from the home sensor instead of toward it.
Return direction matters
If the machine moves in the wrong direction during home return, do not only check the sensor. Check the output direction, motor direction, valve direction, wiring, and mechanical movement together.
Field check points
When home return does not finish, separate the command, movement, sensor, and complete bit.
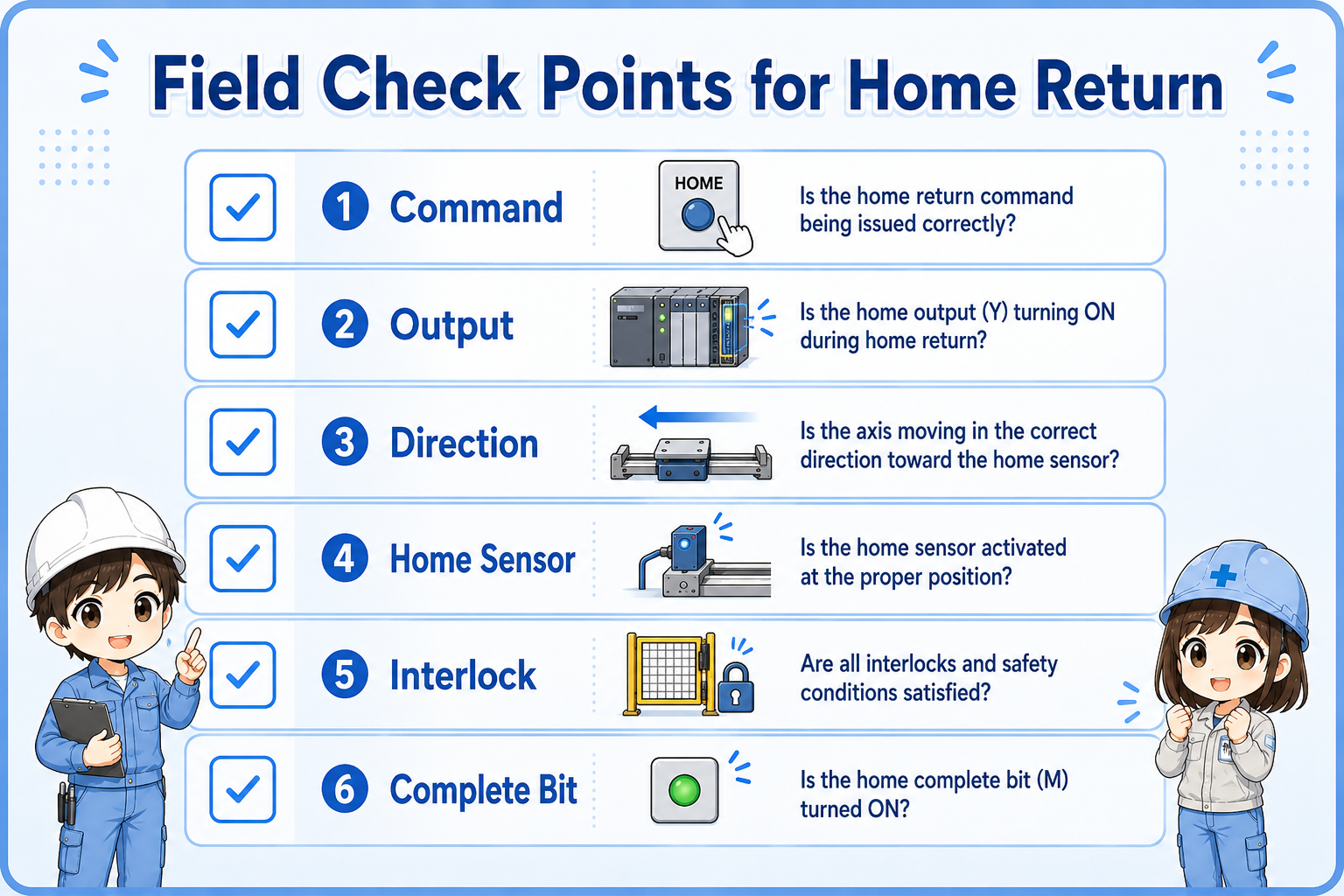
Home return command
Confirm the command turns ON from the button, HMI, or sequence condition.
Return movement output
Check whether the PLC output, relay, valve, motor driver, or servo command turns ON.
Return direction
Confirm the machine actually moves toward the home sensor, not away from it.
Home sensor input
Check the physical sensor, signal lamp, wiring, and PLC input monitor.
Limit and safety conditions
Check emergency stop, guards, limit switches, overtravel signals, and mode conditions.
Home complete bit
Confirm the complete bit is set only after the correct conditions are satisfied.
Short conversation

Home return is used to bring the machine back to a known reference position.

So it is not just moving backward. It has to detect the home sensor and confirm completion?
Exactly. The direction, sensor, and complete condition all need to be checked separately.
If home return does not finish, I should not look only at the sensor?
Right. Check command, output, movement direction, sensor input, interlocks, and the home complete bit in order.
Summary
A home return circuit moves equipment back to a known reference position. It is important before automatic operation because the machine needs to know where the starting point is.
When troubleshooting, separate the home return command, movement output, return direction, home sensor input, interlocks, and home complete bit. This makes the problem much easier to trace.